Ответы
Ответ дал:
1
Ответ:
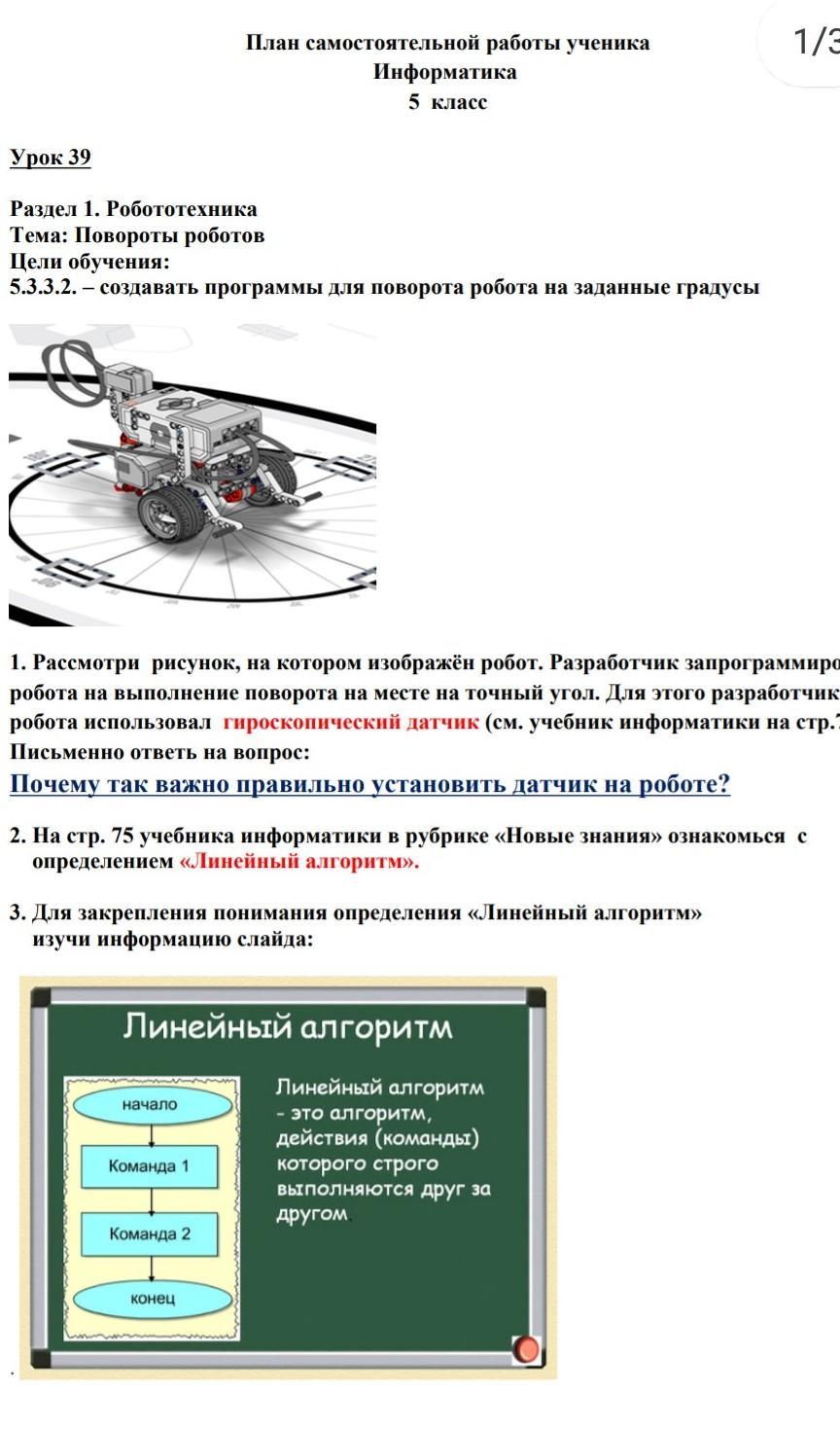
Потому, что положение установленного гиро датчика будет служить точкой отсчёта положения робота в пространстве. Если он изначально стоит криво, то робот будет все расчёты проводить с этими "кривыми" начальными данными. Так же датчик должен быть надёжно закреплён - не болтаться. Иначе это так же внесёт погрешности в расчёты положения робота.
Аноним:
спс чел ты топ
Похожие вопросы
1 год назад
1 год назад
2 года назад
2 года назад
7 лет назад
7 лет назад
9 лет назад